

AI中国 网 https://www.cnaiplus.com


Pixhawk V6X,是CUAV与开源组织PX4深入合作推出的一款全新标准飞控,完全基于Pixhawk FMU v6X标准及模块化设计,新标准,新体验。

官方原版Pixhawk FMU v6X标准
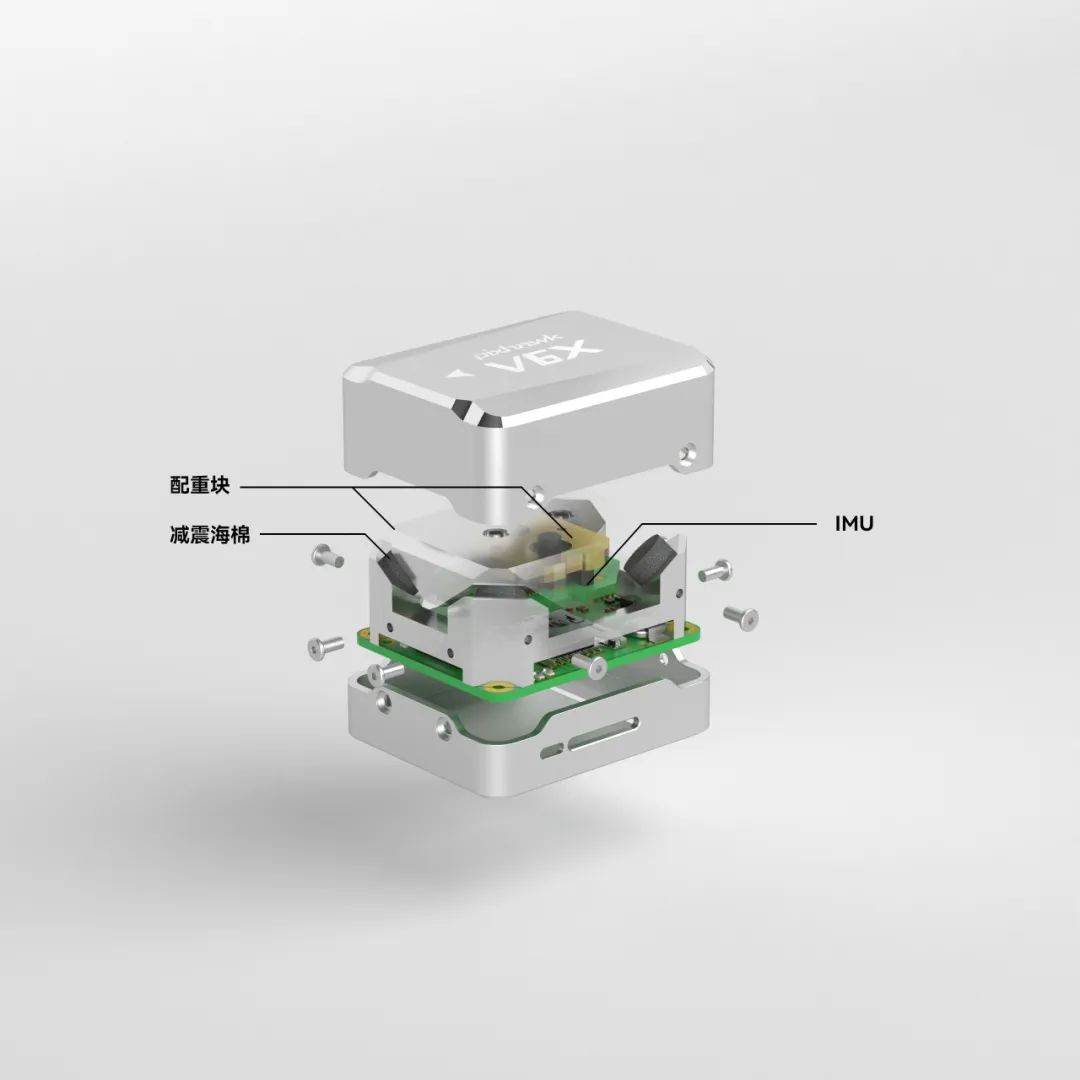
Pixhawk V6X基于Pixhawk FMU v6X官方标准设计,包含高性能、低噪声IMU。结合CUAV新一代专利减震设计,有效滤除高频振动,大幅降低无人机飞行抖动,适应更多工作场景。
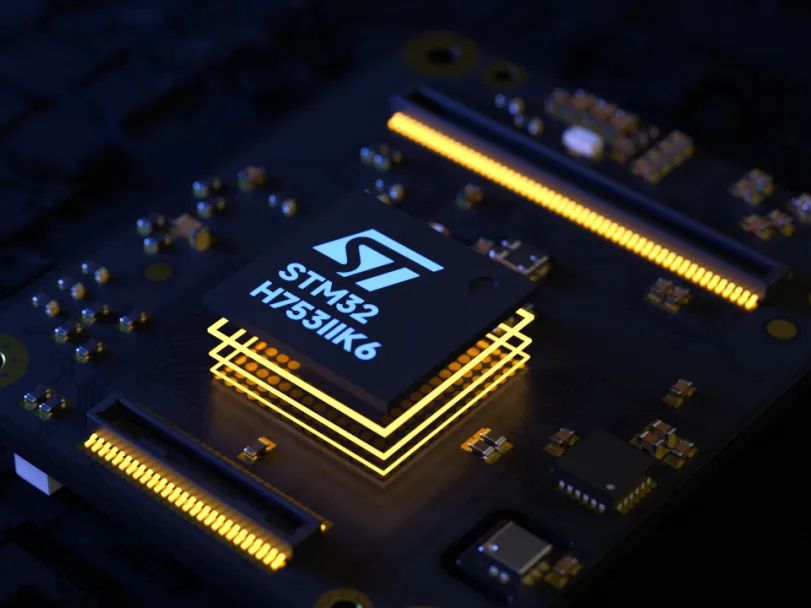
H7双精度浮点运算单元处理器
采用STM32H753处理器,双精度浮点运算单元,主频提升至480MHz,2M FLASH,1MB RAM,为飞行控制器带来强大的运算能力和数据处理能力,为更多的功能开发和飞行稳定性提供更多的空间。
ARM M3协处理器
全新架构设计处理器,自带中断控制器,便于二次开发应用。ARM M3采用程序指令和数据指令分开储存结构,提升执行效率,处理能力更加强大。
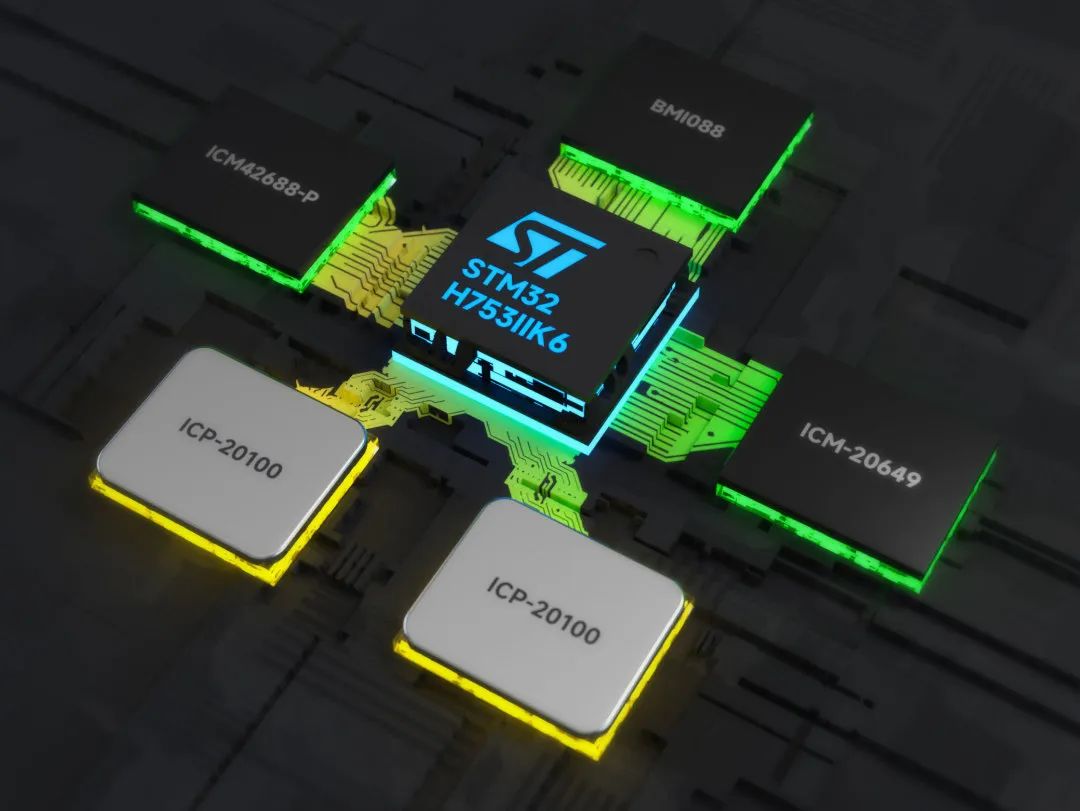
多重冗余设计,极致保障飞行安全
独立总线与独立电源域三冗余IMU
IMU实时测量飞机三轴加速度和角速度,参与飞机速度、位置、姿态角解算。Pixhawk V6X采用三冗余车规级IMU设计,高性能,低噪声,三组IMU皆为独立总线与电源域,保证主 IMU 失效后可快速切换至冗余 IMU,不影响工作状态,最大程度保障飞行安全性及可靠性。
双冗余气压计设计
气压计是根据外界大气压检测相对高度的传感器,为无人机提供精准飞行高度。双冗余气压计设计,保证主气压计失效后,可快速切换到冗余气压计工作,提高无人机飞行稳定性。
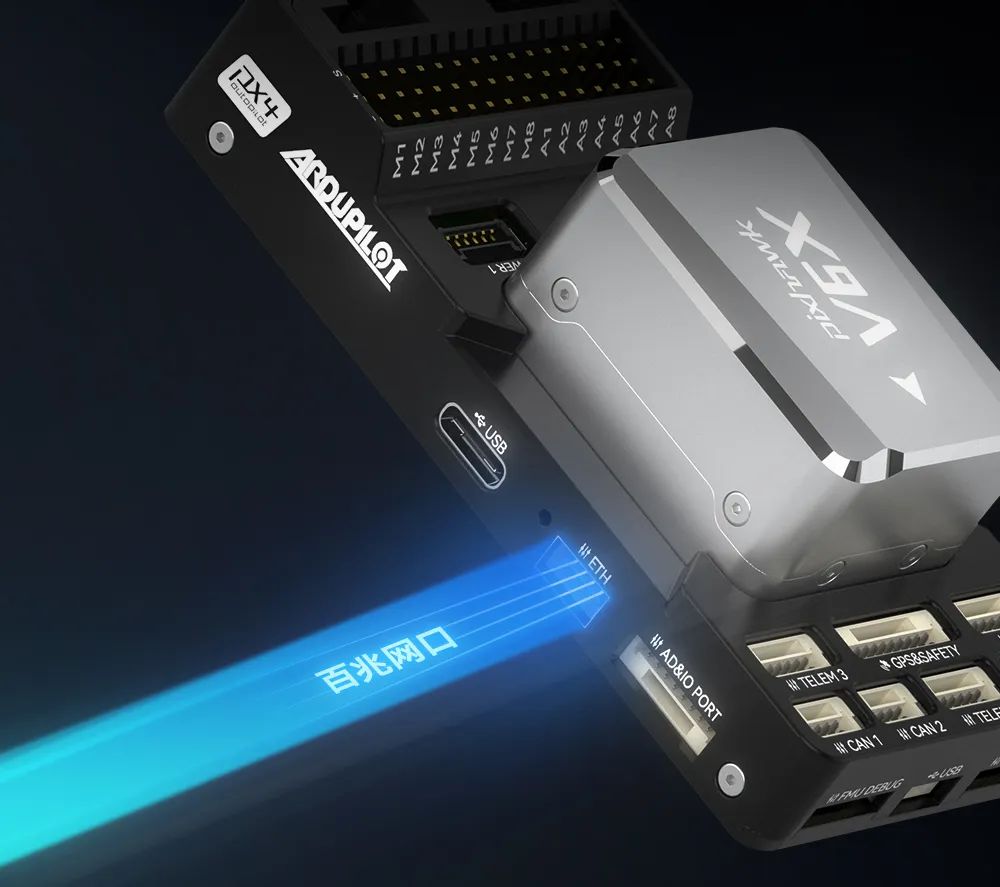
百兆以太网口,丰富高端挂载
百兆以太网应用场景广,适用于突发通信和继续传送大型数据文件,互换操作性好,具有广泛的软硬件支持。外部传感器总线(SPI5)具有两条芯片选择线和数据就绪信号,更带有SPI接口,可通过以太网与任务计算机、光纤惯导、高端测绘相机等工业无人机挂载设备进行高速通信。
固件支持
PX4及Ardupilot固件支持所有机型:固定翼3~8旋翼直升机VTOL垂直起降无人机无人船等。

2008,将无人机开源飞控引入国内,推出了自主设计的高性价比无人机控制器,推动和填补了国内无人机空白。
2012,CUAV正式成立且建成自家生产线,并与国际ArdupilotPX4建立合作,完善了无人机控制器及相关产品。先进的产品与可靠的品质,获得了行业的认可。
2015,组建研发团队,开始软硬件共同研发。成为Dronecode基金会成员,成为Ardupilot官方合作企业。2016,业内首款自主研发mavlink协议的无线高清图数一体链路-Hacklink问世,将客户群扩大至世界各个角落。
公司整体搬迁至中国(广东)自由贸易区广州南沙新区,研发工程师达到20多名,推出高精度差分GPS: C-RTK并大量应用在测绘、无人机表演行业。2018,通过国际质量标准体系ISO9001认证。且推出业内首款商用的:LTE网络的无人机云端系统(UAV-HUB)、LTE网络的通讯模块(LTE-LINK),将无人机无限距离远端控制、云端化的理念引入行业应用。
2017,现在,我们已经拥有自己的研发团队与生产线。并开发了PC端,安卓端,网页端的无人机应用,配合自主研发的飞行控制系统 、GPS定位系统、 无线数字链路系统和无人机云端(UAV-HUB)解决方案, 让无人机更好的服务于每一个应用。
AI中国 网 https://www.cnaiplus.com
本文网址:

